概要
PCL(点群処理ライブラリ)のが出たということで触って見た。
まだ python pcl でできる部分は少ないみたい。
Env
Linux ubuntu 3.8.0-29-generic #42~precise1-Ubuntu SMP Wed Aug 14 15:31:16 UTC 2013 i686 i686 i386 GNU/Linux
インストール
PCL
# install add-apt-repository $ sudo apt-get install software-properties-common python-software-properties # add repository for pcl $ sudo add-apt-repository ppa:v-launchpad-jochen-sprickerhof-de/pcl $ sudo apt-get update $ sudo apt-get install libpcl-all
Pythonバインディング
$ sudo apt-get install python-pip # install Python.h $ sudo apt-get install python-dev # install Cython.Distutils $ sudo pip install Cython $ sudo pip install numpy # Install python binding $ git clone https://github.com/strawlab/python-pcl.git $ python setup.py install
Run Sample
Pythonバインディングサンプル
import pcl
p = pcl.PointCloud()
p.from_file("test_pcd.pcd")
fil = p.make_statistical_outlier_filter()
fil.set_mean_k (50)
fil.set_std_dev_mul_thresh (1.0)
fil.filter().to_file("inliers.pcd")
$ wget http://www.pointclouds.org/assets/files/presentations/IROS2011-PCL-tutorial-data.zip $ unzip IROS2011-PCL-tutorial-data.zip $ cp data/robot/raw_0.pcd ./test_pcd.pcd $ python pcltest.py
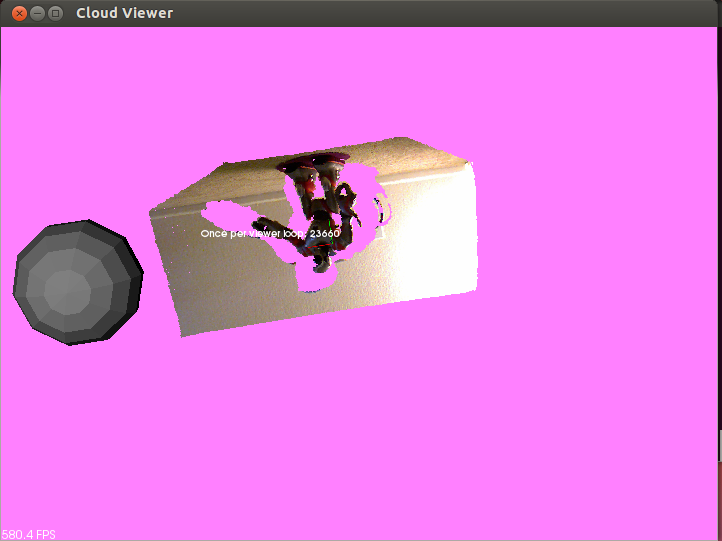
実行結果の確認
pcd形式のデータをviewerを作って確認する。
#include <pcl/visualization/cloud_viewer.h>
#include <iostream>
#include <pcl/io/io.h>
#include <pcl/io/pcd_io.h>
int user_data;
void
viewerOneOff (pcl::visualization::PCLVisualizer& viewer)
{
viewer.setBackgroundColor (1.0, 0.5, 1.0);
pcl::PointXYZ o;
o.x = 1.0;
o.y = 0;
o.z = 0;
viewer.addSphere (o, 0.25, "sphere", 0);
std::cout << "i only run once" << std::endl;
}
void
viewerPsycho (pcl::visualization::PCLVisualizer& viewer)
{
static unsigned count = 0;
std::stringstream ss;
ss << "Once per viewer loop: " << count++;
viewer.removeShape ("text", 0);
viewer.addText (ss.str(), 200, 300, "text", 0);
//FIXME: possible race condition here:
user_data++;
}
int
main ()
{
pcl::PointCloud<pcl::PointXYZRGBA>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZRGBA>);
pcl::io::loadPCDFile ("test_pcd.pcd", *cloud);
pcl::visualization::CloudViewer viewer("Cloud Viewer");
//blocks until the cloud is actually rendered
viewer.showCloud(cloud);
//use the following functions to get access to the underlying more advanced/powerful
//PCLVisualizer
//This will only get called once
viewer.runOnVisualizationThreadOnce (viewerOneOff);
//This will get called once per visualization iteration
viewer.runOnVisualizationThread (viewerPsycho);
while (!viewer.wasStopped ())
{
//you can also do cool processing here
//FIXME: Note that this is running in a separate thread from viewerPsycho
//and you should guard against race conditions yourself...
user_data++;
}
return 0;
}
$ vim CMakeLists.txt
cmake_minimum_required(VERSION 2.8 FATAL_ERROR)
project(cloud_viewer)
find_package(PCL 1.2 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable (cloud_viewer cloud_viewer.cpp)
target_link_libraries (cloud_viewer ${PCL_LIBRARIES})
$ cmake .
$ make
$ export LC_ALL=C
$ ./cloud_viewer
元のPCD

変換後のPCD
