Sometimes I take a course on Udacity which provides many online courses for IT engineer.
I finished Self-Driving Car Engineer Nanodegree course which is for controlling Self-Driving Car on 2020. The course covers many topics and provides many assignments. So, it took a lot of time. I took rest between terms though (there were 3 terms).
It look a lot time, but the contents were so interesting for me. I’ll share some of the topics. Especially assignments.
Note that Initially there were 3 terms but now 2 terms, and some of assignments were reduced.
The assignment for detecting lane with noise reduction, transforming perspective, binarizing and fitting with polynomials.
At last of the assignment, I needed to detect lane of a video of driveway. The video has different color road and shadow, so tuning of algorithms was tough.
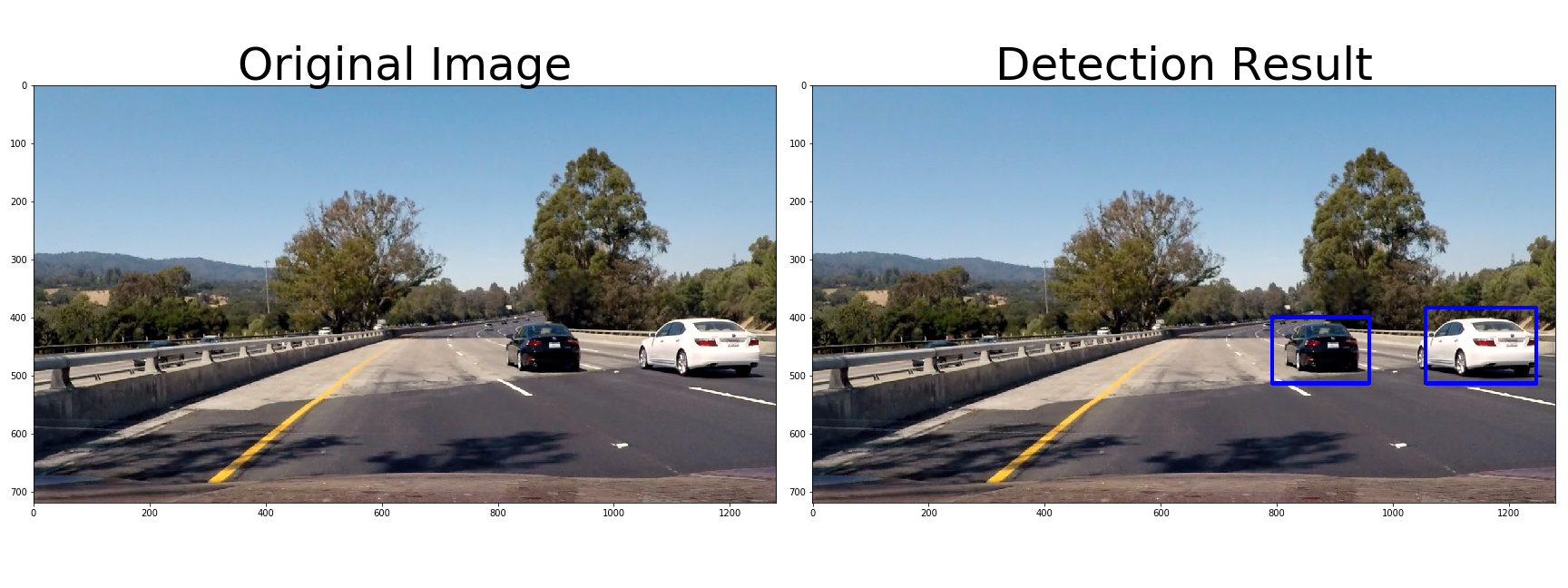
The assignment for training Convolutional Neural Network and recognizing traffic signs from images.
The following image is not provided by the course, but training and test image like following.
Training Deep Learning Model for Vehicle Steering and Accelerator
The assignment for handling a vehicle on 3D simulator using Deep Learning model trained by vehicle handling data on 3D simulator by human.
My result was the following.
Vehicle State Estimation with Kalman Filter and Particle Filter
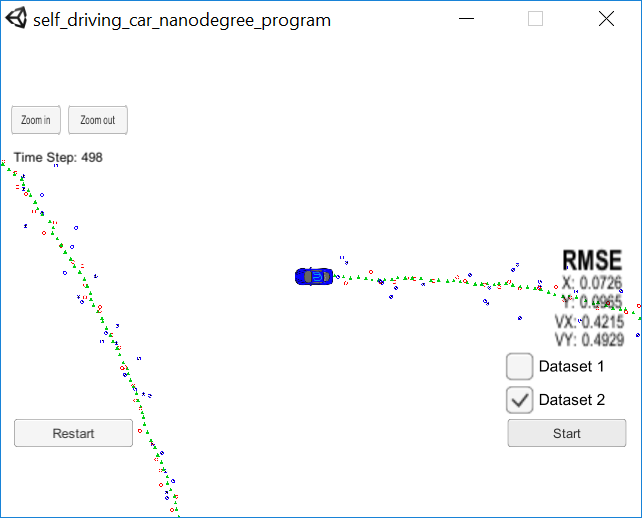
The assignment to estimate a vehicle state on 2D simulator with Kalman Filter and Particle Filter.
2D simulator is like following image.
Control of Vehicle Steering and Accelerator with Model Predictive Control and PID Control
The assignment to control a vehicle on 3D simulator with Model Predictive Control and PID Control.
The following GIF image shows Model Predictive Control result.
The following GIF image shows PID Control result.
Control of Vehicle on Highway on 3D simulator
The assignment for controlling a vehicle on highway which there are some other vehicles and 3 lanes.
This assignment was quite tough for me. I had to keep tuning my program to make the vehicle run stably. The vehicle on the simulator was sensitive, so it was difficult to make it change lanes without colliding with other vehicles, and to make it change speed gently.
Control of Udacity’s Real Vehicle on Test Course
The assignment was so impressive for me. I couldn’t imagine that I can upload my program to a real vehicle for an assignment.
Unfortunately, I couldn’t try the assignment because of COVID-19.
About The Course
The course covers not only above topics but also other related topics like A* algorithm and ROS which is a software for robot application.
And Udacity staff reviews my assignment (they share some advices and document links), and corrects resume for job hunting.
But the volume is big and there is a deadline. So, if you want to take the course, you need to set aside some time constantly to progress the course. Note that the course fee is $399 / month (I checked the fee during writing this article), and estimated time to finish is 5 months with 10 hours / week (that means it costs around $20,000).